

gps在测绘工作中的应用


gps是以全球定位系统卫星为基础的无线电导航定位系统,具有全能性、全球性、全天侯、连续性和实时性的功能,能提供精密的三维坐标、速度和时间参数。gps技术已广泛应用于大地测量、工程测量、航空测量、海洋测量、城市测量等领域。
gps系统主要由gps卫星、地面监控系统及gps接收机组成。gps卫星由21颗工作卫星和3颗在轨备用卫星组成。24颗卫星均匀分布在6个轨道平面内,在全球任何地方都至少可观测到4颗以上的卫星信号,最多可观测到11颗卫星信号;地面监控系统由1个主控站、3个注入站、5个监测站以及通讯与辅助系统组成。用户部分是由gps接收机等仪器组成。其任务是能够捕获到按一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,对所接收到的gps信号进行变换、放大和处理,以便测量出gps信号从卫星到接收机天线的传播时间,解译出gps卫星所发送的导航电文,实时地计算出测站的三维位置,再通过计算机和相应软件,经基线解算、网平差,求出gps接收机中心(测站点)的三维坐标。
gps定位原理是根据测量学中测距交会法来实现的,在测站点p设置gps接收机,在t1刻gps接收机同时测得p点至3颗(及以上)gps卫星s1 、s2 、s3的距离ρ1,ρ2,ρ3,通过gps电文解译出该时刻3颗gps卫星的三维坐标分别为(xj ,yj ,zj),j=1,2,3。用距离交会的方法求解p点的三维坐标(x,y,z)的观测方程为:
ρ12=(x-x1)2+(y-y1)2+(z-z1)2
ρ22=(x-x2)2+(y-y2)2+(z-z2)2
ρ32=(x-x3)2+(y-y3)2+(z-z3)2
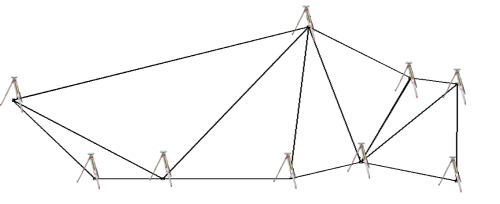
求解以上方程式则得到p点的三维坐标(x,y,z)。由于各国坐标系统采用的地球椭球参数和重力参数都不一样,因此,按上式计算出来的测站点坐标投影到平面坐标系统中的误差很大,但在同一时段观测的各测站之间的相对边长精度很高,其相对精度在50㎞以内可达10-6,在300-1500m工程精密定位中,1小时以上观测的解,其平均平面误差小于1mm。因此gps在大地测量、控制测量中一般是组成网型进行观测和平差计算,如下图。
gps 控制网图
此外我们在实际工程项目中还广泛应用gps载波相位差分的实时动态测量技术(gps rtk)进行图根控制测量、地形测量和其它工程定位测量等。
工程案例:深圳市大运中心施工控制测量、深圳机场新航站区施工控制测量等。
Shenzhen Geokey Group Co., Ltd. All rights reserved.
